Guide LAS, LAZ, E57 : comment choisir le bon format pour vos nuages de points 3D ?
Un scanner 3D moderne peut aujourd’hui capturer un bâtiment, une voirie, une usine ou un corridor ferroviaire en quelques minutes. Mais une fois l’acquisition terminée, une question revient systématiquement : quel format faut-il utiliser pour exploiter correctement les données ?
Entre les fichiers .LAS, .LAZ et .E57, les différences ne sont pas toujours évidentes, y compris pour des professionnels habitués aux workflows BIM, SIG ou topographiques. Pourtant, le choix du format influence directement les performances d’affichage, la compatibilité logicielle, la capacité de traitement, le géoréférencement, la conservation des métadonnées et la qualité des livrables transmis au client. Dans les faits, il n’existe pas un “meilleur” format universel. Un bureau d’étude infrastructure, un géomètre, un BIM manager ou une collectivité n’auront pas les mêmes contraintes de stockage, de précision ou d’interopérabilité. C’est particulièrement vrai avec l’arrivée des scanners mobiles LiDAR et des workflows SLAM modernes, capables de produire plusieurs dizaines de gigaoctets de données par heure. Les usages se multiplient : Scan-to-BIM, récolement, mobile mapping, jumeaux numériques, SIG, patrimoine, inspection industrielle ou visualisation immersive. Et derrière chaque usage se cachent des arbitrages techniques réels.
Le sujet dépasse largement la simple extension de fichier. Un format conditionne aussi la manière dont la donnée pourra être relue, partagée, archivée ou réexploitée plusieurs années plus tard.
Ce que contient réellement un fichier de nuage de points
Un nuage de points n’est pas uniquement une “photo 3D”.
Dans sa forme la plus simple, un point contient des coordonnées XYZ dans l’espace. Mais selon le scanner, le workflow et le format utilisé, il peut également embarquer des informations de couleur RGB, d’intensité LiDAR, de classification, d’horodatage ou encore des métadonnées liées à la trajectoire et au géoréférencement. C’est cette richesse qui explique pourquoi deux fichiers visuellement similaires peuvent avoir une valeur métier très différente.
Dans un workflow topographique ou SIG, les classifications deviennent par exemple essentielles pour distinguer automatiquement le sol, la végétation ou les bâtiments. Dans un workflow BIM ou scan terrestre, les positions de stations et les images embarquées prennent davantage d’importance.
Un autre point souvent mal compris concerne la différence entre acquisition brute, traitement et livrable final. Un scanner mobile comme le CHCNAV RS10 ou le CHCNAV RS7 ne produit pas directement un “modèle 3D final”. Il produit une matière numérique brute qui devra ensuite être recalée, nettoyée, parfois classifiée puis convertie selon l’usage attendu.
C’est précisément pour cette raison que le choix du format devient stratégique.
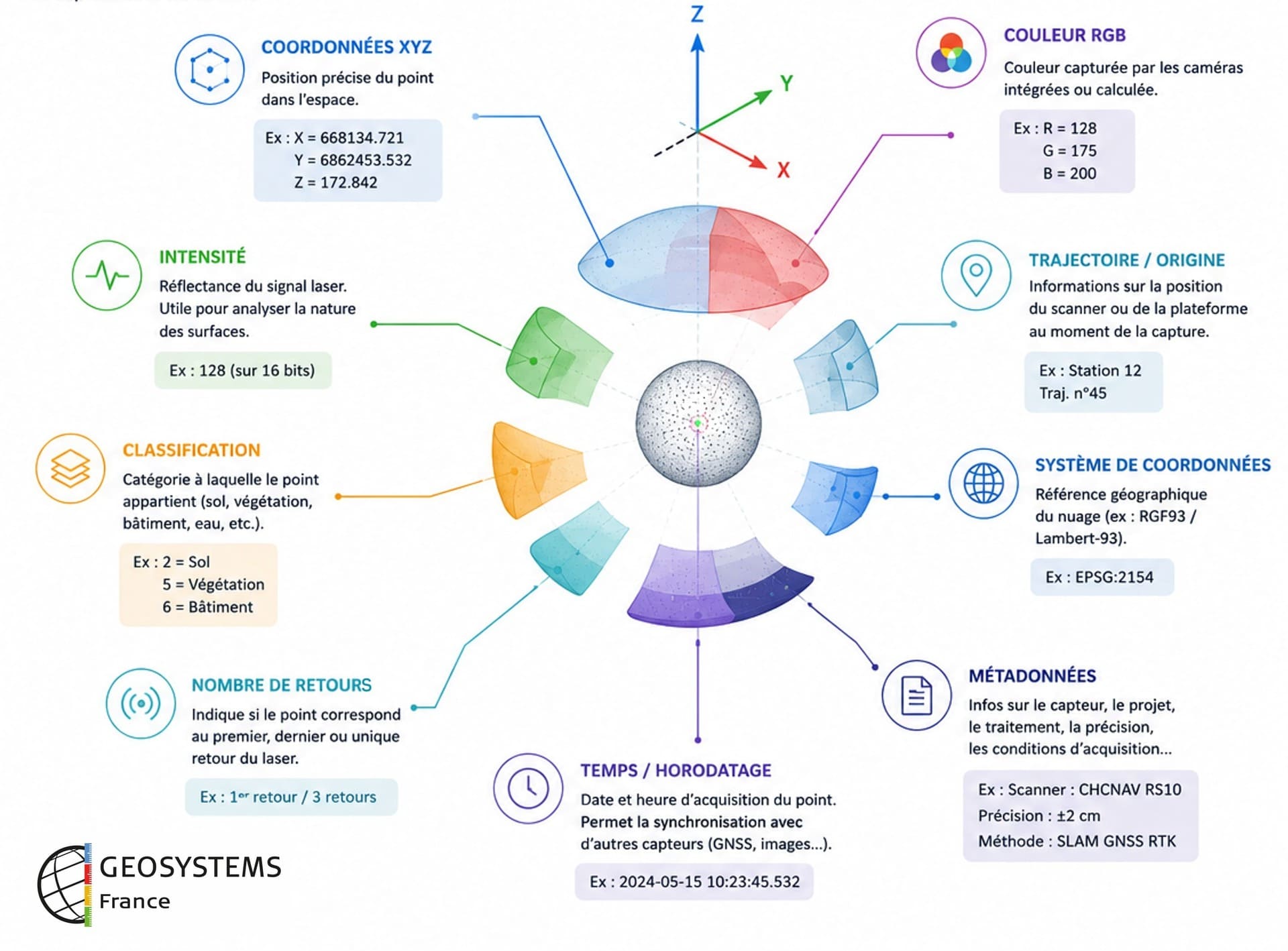
Un nuage de points n’est pas seulement une collection de coordonnées XYZ. Chaque point peut contenir de nombreuses informations selon le format, le capteur et le traitement.
LAS : le bon choix pour LiDAR topo, géospatial et données classifiées
Le format LAS reste aujourd’hui le standard historique du LiDAR professionnel.
Il est extrêmement utilisé dans la topographie, les infrastructures, le mobile mapping, les données IGN LiDAR HD ou encore les workflows SIG avancés. Sa structure est très orientée exploitation technique et géospatiale.
Un fichier LAS peut stocker non seulement les coordonnées XYZ, mais également les intensités laser, les classifications automatiques, les couleurs RGB, les retours multiples ou encore des informations liées au système de coordonnées et au géoréférencement.
Cette richesse le rend particulièrement adapté aux workflows nécessitant des calculs, des analyses, des traitements automatiques ou des classifications massives. Dans des logiciels comme CloudCompare, Global Mapper ou ArcGIS Pro, le LAS reste souvent plus pratique qu’un E57 pour les traitements géospatiaux lourds.
Attention toutefois à la version du format utilisé. Alors que le LAS 1.2 reste un standard hérité encore très présent, c’est le LAS 1.4 qui s’impose aujourd’hui comme le standard indispensable pour les projets modernes. Le LAS 1.4 permet notamment de coder un nombre de classifications bien plus élevé (jusqu’à 256 classes contre 32 auparavant) et gère mieux les retours multiples. C’est un critère crucial à l’heure où les algorithmes d’Intelligence Artificielle et de Deep Learning classifient automatiquement et massivement la sémantique des infrastructures (distinction précise entre bordures, panneaux, câbles aériens, etc.).
C’est également le format privilégié dans beaucoup de projets d’infrastructures linéaires, de corridor mapping ou de cartographie territoriale.
En contrepartie, les fichiers LAS peuvent devenir extrêmement volumineux. Avec des scanners mobiles récents dépassant plusieurs centaines de milliers voire millions de points par seconde, les volumes explosent rapidement.
LAZ : ce que la compression change et ce qu’elle ne change pas
Le point important à comprendre est simple : le LAZ n’est pas “un autre type de donnée”.
Le LAZ est un LAS compressé sans perte. Autrement dit, après décompression, on retrouve exactement les mêmes informations que dans le LAS d’origine, avec les mêmes coordonnées, classifications, couleurs et attributs techniques. La différence concerne principalement le poids des fichiers.
Selon les projets, un fichier LAZ peut être plusieurs fois plus léger (jusqu’à cinq fois) qu’un LAS classique. Dans certains workflows mobile mapping ou LiDAR aérien, qui dépassent les 100 Go de données, cette réduction devient essentielle. Concrètement, cela permet d’accélérer les transferts cloud, de réduire les besoins de stockage, de fluidifier les échanges clients et de simplifier l’archivage de grands volumes de données. Aujourd’hui, beaucoup de structures travaillent quotidiennement en LAZ tout en conservant parfois les LAS bruts comme référence technique ou archive source.
Mais il faut garder une nuance importante : certains logiciels ou pipelines anciens gèrent encore moins bien le LAZ natif. Dans certains cas, une décompression intermédiaire reste nécessaire. C’est d’ailleurs une des raisons pour lesquelles certains utilisateurs pensent à tort que le LAZ “fonctionne moins bien”.
E57 : le bon choix pour scan terrestre, BIM et archivage riche
Le format E57 a été pensé dès l’origine comme un format d’échange polyvalent pour le scan 3D.
Contrairement au LAS historiquement orienté LiDAR géospatial, le E57 facilite les échanges entre plusieurs logiciels et plusieurs métiers : BIM, architecture, industrie, patrimoine ou exploitation technique.
Son principal avantage est sa capacité à embarquer plusieurs types d’informations dans un même fichier. Un E57 peut contenir simultanément des nuages de points, des images panoramiques, des positions de scans, des métadonnées ou encore différentes scènes regroupées dans un même projet. Cette polyvalence explique pourquoi il est devenu extrêmement courant dans les workflows liés à Autodesk ReCap, Leica Cyclone, Trimble RealWorks, FJD Trion Model, CHCNAV CoProcess ou Revit.
Le E57 est particulièrement pertinent lorsque plusieurs intervenants doivent réutiliser la donnée sans imposer un logiciel propriétaire spécifique. Dans un projet BIM, il permet par exemple à un géomètre de transmettre une acquisition exploitable à un BIM modeler ou à un architecte sans multiplier les conversions intermédiaires.
Autre intérêt : le E57 conserve généralement mieux la logique “scan terrestre” que certains workflows LAS/LAZ. Les stations, orientations et images restent plus faciles à exploiter dans des environnements BIM ou architecture.
En revanche, il faut éviter de considérer le E57 comme systématiquement “meilleur”. Dans certains workflows LiDAR très volumineux ou orientés SIG, le LAS ou le LAZ restent souvent plus efficaces.
Quel format choisir selon votre cas d’usage
Usage métier | Format généralement le plus pertinent | Pourquoi ? |
|---|---|---|
Topographie / SIG | LAS ou LAZ | Classification, géoréférencement, traitements LiDAR |
Scan-to-BIM | E57 | Interopérabilité multi-logiciels |
Archivage gros volumes | LAZ | Compression sans perte |
Données IGN LiDAR HD | LAZ | standard géospatial massif |
Visualisation immersive | OBJ / PLY / Gaussian Splatting | Rendu visuel et navigation |
Récolement réseaux | LAS / LAZ / orthophoto | Précision et exploitation SIG |
Patrimoine / architecture | E57 + mesh texturé | Conservation riche des scans |
Revit | E57 à convertir en RCP | Meilleure compatibilité scan terrestre |
Consultation client / Exploitation Cloud | Potree / Formats indexés (ou plateformes comme GéoCassini, Cintoo, AtisCloud, Autodesk Construction Cloud) | Permet de streamer des téraoctets de données dans un simple navigateur web sans PC surpuissant. |
Dans la pratique, un même projet produit souvent plusieurs livrables simultanément. Un géomètre peut par exemple conserver un LAS maître pour les traitements techniques, produire un LAZ pour l’archivage et les échanges, transmettre un E57 à une équipe BIM puis générer une orthophoto ou un viewer web destiné au maître d’ouvrage.
Cette transition vers le livrable client marque d’ailleurs l’essor des formats de streaming de nuages de points (comme le format open-source Potree). Aujourd’hui, le livrable final n’est plus forcément un fichier lourd stocké sur un disque dur, mais un accès à une plateforme Cloud. Ces outils convertissent les fichiers E57 ou LAS en formats hautement compressés et indexés pour le web, permettant à un maître d’ouvrage de mesurer et de visiter son usine ou son bâtiment depuis une simple tablette ou un ordinateur de bureau standard.
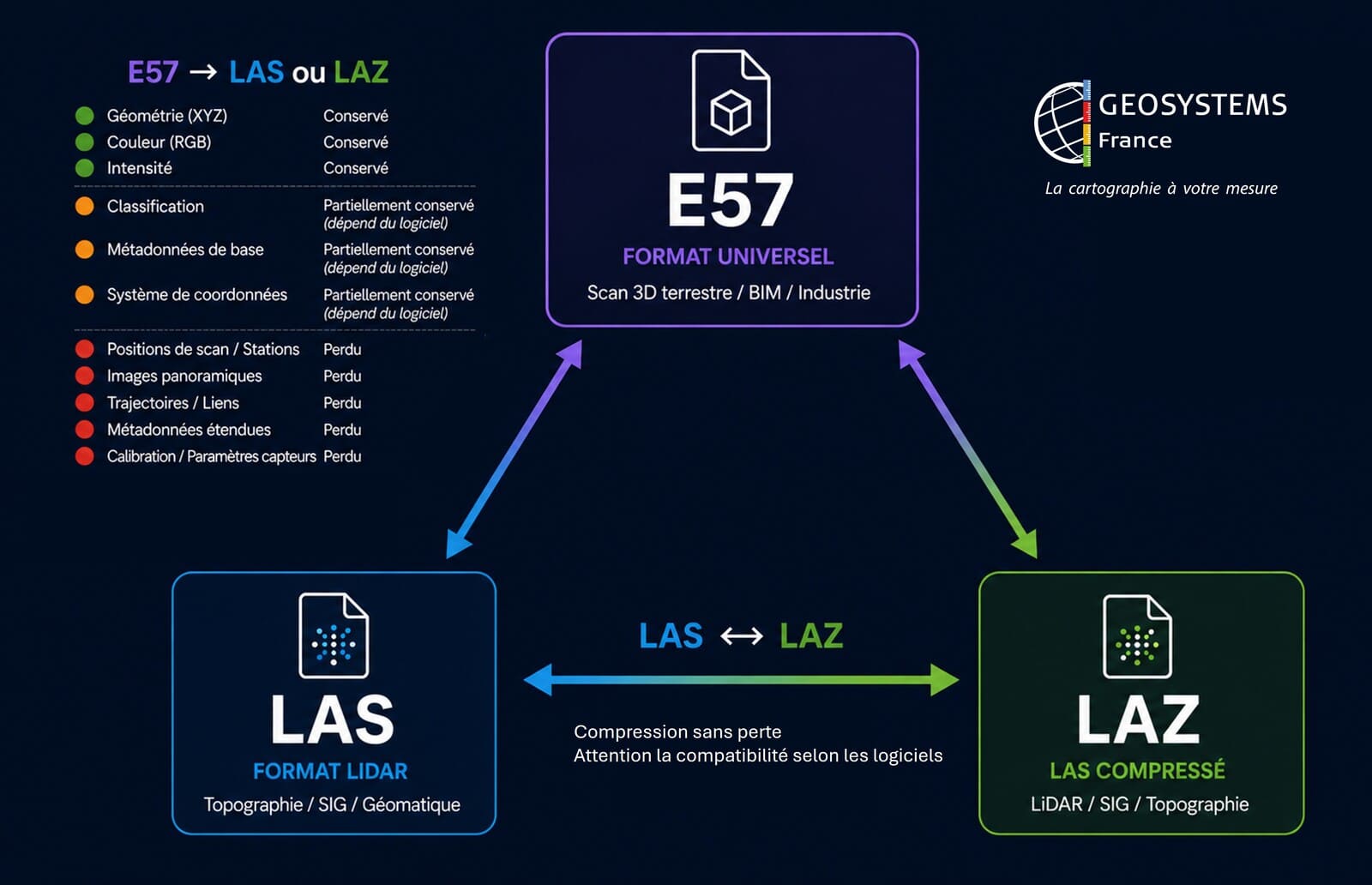
Ce que vous perdez ou conservez en convertissant E57, LAS et LAZ
C’est probablement le vrai sujet opérationnel derrière beaucoup de recherches Google à propos des différents formats.
Toutes les conversions ne sont pas neutres. Un passage E57 → LAS peut par exemple entraîner la perte de certaines informations de stations, d’images embarquées ou de métadonnées spécifiques au scan terrestre. À l’inverse, un LAS → E57 peut parfois compliquer certaines classifications LiDAR massives ou certains workflows SIG avancés.
Il faut également distinguer compatibilité d’ouverture, compatibilité d’exploitation et compatibilité métier réelle. Un logiciel peut ouvrir un fichier sans forcément exploiter correctement toutes ses données. C’est particulièrement vrai avec les images panoramiques, les classifications, certains systèmes de coordonnées ou les attributs propriétaires.
La prudence reste donc importante avant de convertir massivement des données de production sans vérifier les impacts sur le workflow final.
Logiciels et workflows en France
En France, plusieurs environnements logiciels dominent selon les métiers :
- Géospatial et LiDAR : CloudCompare, QGIS, ArcGIS Pro, Global Mapper ou Terrasolid restent très présents.
- BIM et scan terrestre : Autodesk ReCap, Revit, Navisworks, Leica Cyclone et Trimble RealWorks dominent encore largement.
- SLAM et mobile mapping modernes : des outils comme CoPre, CoProcess ou Trion Model prennent une place croissante, notamment pour les acquisitions dynamiques et les traitements rapides. Ils intègrent aussi souvent des fonctionnalités 3DGS et maillage 3D.
La question du Lambert-93 et du géoréférencement reste également centrale dans beaucoup de projets, notamment pour les collectivités, les infrastructures, les données IGN ou les workflows DT-DICT. Un modèle spectaculaire mais mal géoréférencé peut devenir très difficile à réutiliser opérationnellement.
Checklist de livraison pour bureau d’étude, géomètre ou collectivité
Point de contrôle | Ce qu’il faut vérifier concrètement | Le risque si on ne le fait pas |
|---|---|---|
Géoréférencement & grille altimétrique | Le fichier intègre-t-il le bon système (ex: Lambert-93 / CC48) ET la bonne grille d’altitude (RAF20) ? Les coordonnées ne sont-elles pas tronquées ? | Le nuage « vole » ou « est enterré ». Il y a un décalage entre le nuage et le cadastre ou le plan de masse (décalage de 50 cm en hauteur). |
Nettoyage & « bruit » | Les voitures, les piétons, la poussière et les « points fantômes » (reflets dans les vitres, reflets de miroirs) ont-ils été supprimés ? | Modélisation impossible. Le modeleur BIM va devoir essayer de deviner où se trouve le vrai mur derrière le « bruit » des points parasites. |
Structure des stations (si E57) | Les positions des scanners terrestres et les images panoramiques à 360° sont-elles bien exportées dans le fichier ? | Perte de la vue immersive. Le nuage de points global en « vrac », il ne sera pas possible de double-cliquer sur une bulle pour voir la vraie photo du site. |
Alignement & recalage SLAM | Si l’acquisition est faite au scanner mobile, a-t-on vérifié l’absence de « double paroi » (défaut d’alignement géométrique lors de la trajectoire) ? | Erreur de mesure fatale. Une cloison qui fait 30 cm d’épaisseur dans le nuage n’en fait que 10 en réalité. |
Format & découpage (Poids) | Le format est-il aligné avec le logiciel du client (ex: RCS/RCP pour Autodesk) ? Si le fichier fait +50 Go, a-t-il été partitionné par zones ou par niveaux ? | Crash machine. La station de travail va planter lors de l’import du fichier dans le logiciel de dessin. |
Test d’import croisé | A-t-on testé d’ouvrir le livrable dans un logiciel tiers neutre (ex: CloudCompare) pour vérifier que les couleurs (RGB) et l’intensité s’affichent correctement ? | Effet « boîte noire ». Le fichier s’ouvre, mais il est tout noir ou tout gris parce que les attributs de couleur ont sauté lors de l’export. |
Fiche technique de livraison | Le livrable est-il accompagné d’un simple PDF indiquant : le matériel utilisé, la date, la précision du recalage (le rapport de tolérance) et le repère d’origine ? | Donnée jetable. Plus tard, personne ne saura si le nuage est fiable à 5 mm ou à 5 cm. |
L’application d’une checklist de contrôle sécurise les livrables. Elle garantit que la donnée capturée ne soit pas seulement « visuelle », mais immédiatement exploitable par les équipes de conception et d’ingénierie.
FAQ
Le contenu est théoriquement identique. Le LAZ correspond à un LAS compressé sans perte. Après décompression, les points et attributs restent les mêmes.
Non. Le E57 est excellent pour l’interopérabilité BIM et scan terrestre. Le LAS reste souvent plus pertinent pour les workflows LiDAR géospatiaux et les traitements SIG avancés.
Le E57 est généralement le plus pratique dans les workflows Revit et Scan-to-BIM grâce à sa bonne prise en charge des scans terrestres et de l’interopérabilité multi-logiciels.
Le LAZ est aujourd’hui très courant pour les jeux de données LiDAR massifs. QGIS et CloudCompare les gèrent correctement dans la plupart des workflows modernes.
Selon les logiciels et pipelines, on peut perdre certaines informations liées aux stations, images ou métadonnées de scan terrestre.
Oui dans beaucoup de cas, car la compression est sans perte. Certaines structures conservent néanmoins les LAS sources ou les données brutes scanner pour des raisons de traçabilité.
Certains logiciels anciens ou workflows spécifiques nécessitent encore une décompression intermédiaire ou gèrent incomplètement certains attributs.
Un nuage structuré conserve généralement une logique de station ou d’organisation liée à l’acquisition. Un nuage non structuré représente davantage un ensemble global de points fusionnés.
Pour finir
Il n’existe pas un format universellement meilleur pour les données LiDAR. Le LAS privilégie la richesse géospatiale et les traitements techniques, le LAZ optimise le stockage et les échanges, tandis que le E57 facilite l’interopérabilité entre métiers et logiciels. Le bon choix dépend toujours du workflow, du logiciel cible, du niveau de précision attendu, du volume de données et surtout du livrable métier final.
La vraie difficulté n’est plus seulement de capturer la réalité. Elle consiste désormais à produire une donnée fiable, exploitable et réutilisable durablement dans des environnements BIM, SIG et infrastructure de plus en plus complexes. Dans beaucoup de projets, plusieurs formats coexistent d’ailleurs simultanément afin de répondre aux besoins des différents intervenants : géomètres, BIM managers, exploitants, collectivités ou bureaux d’études.