Nuage de points 3D : définition, usages et applications concrètes pour le bâtiment et les infrastructures
Nuage de points 3D : définition, usages et applications concrètes pour le bâtiment et les infrastructures
Le terme “nuage de points 3D” revient aujourd’hui dans de nombreux projets liés au BIM, à la rénovation, à la construction, aux infrastructures, au patrimoine ou encore aux collectivités. Pourtant, derrière cette expression souvent utilisée de manière générique, les réalités techniques et les usages concrets restent encore mal compris.
Un nuage de points n’est ni une simple image 3D, ni automatiquement une maquette BIM, ni un “jumeau numérique” prêt à l’emploi. Il s’agit avant tout d’une représentation digitale extrêmement dense du réel, produite à partir de technologies d’acquisition comme la lasergrammétrie, le scan mobile SLAM ou la photogrammétrie. Ces technologies permettent de relever rapidement un bâtiment, une voirie, une usine, un chantier ou un ouvrage complexe avec des millions de points géoréférencés. Mais la véritable difficulté ne réside plus uniquement dans la capture terrain. Elle se situe surtout dans la capacité à transformer cette masse de données en livrables réellement exploitables : plans 2D, orthophotos, maquettes BIM, contrôles géométriques, Dossier des Ouvrages Exécutés (DOE), récolement ou visualisations immersives. Pour un bureau d’étude, une collectivité, un architecte ou une entreprise de travaux, comprendre ce qu’est réellement un nuage de points devient donc essentiel pour cadrer correctement un projet, choisir les bons livrables et éviter des workflows inadaptés.
Les enjeux dépassent largement la simple technologie. Ils concernent également la précision réelle des données, le géoréférencement, les volumes de fichiers, la compatibilité logicielle et surtout la capacité à produire une donnée exploitable par les métiers concernés. La qualité d’un projet dépend autant de la méthodologie, du traitement et du contrôle qualité que du scanner lui-même.
Qu’est-ce qu’un nuage de points 3D, concrètement ?
Un nuage de points 3D est une représentation digitale du réel composée de millions, parfois de milliards de points positionnés dans l’espace.
Chaque point possède au minimum une coordonnée X, Y et Z. Selon les systèmes utilisés, les points peuvent également contenir des informations complémentaires comme une couleur RGB, une intensité LiDAR, un horodatage, des coordonnées géographiques, des informations de classification ou encore des données liées à la trajectoire du scanner.
Visuellement, un nuage de points ressemble souvent à une reconstruction “point par point” d’un environnement réel. Lorsqu’il est suffisamment dense, l’œil humain reconstitue naturellement les volumes : murs, sols, réseaux, végétation, équipements industriels ou mobilier urbain. Mais il est important de comprendre qu’un nuage de points ne “comprend” pas réellement ce qu’il représente. Un mur n’est pas identifié comme un mur, une porte n’est pas reconnue comme une porte et une canalisation n’est pas automatiquement interprétée comme un réseau. Le système stocke avant tout des positions dans l’espace.
C’est précisément ce qui fait la force du nuage de points dans les workflows techniques : il conserve une représentation fidèle et mesurable du réel, sans simplification géométrique excessive.
Cette approche est aujourd’hui utilisée dans :
- la topographie,
- le Scan to BIM,
- le récolement,
- les infrastructures,
- les environnements industriels,
- et les projets patrimoniaux.
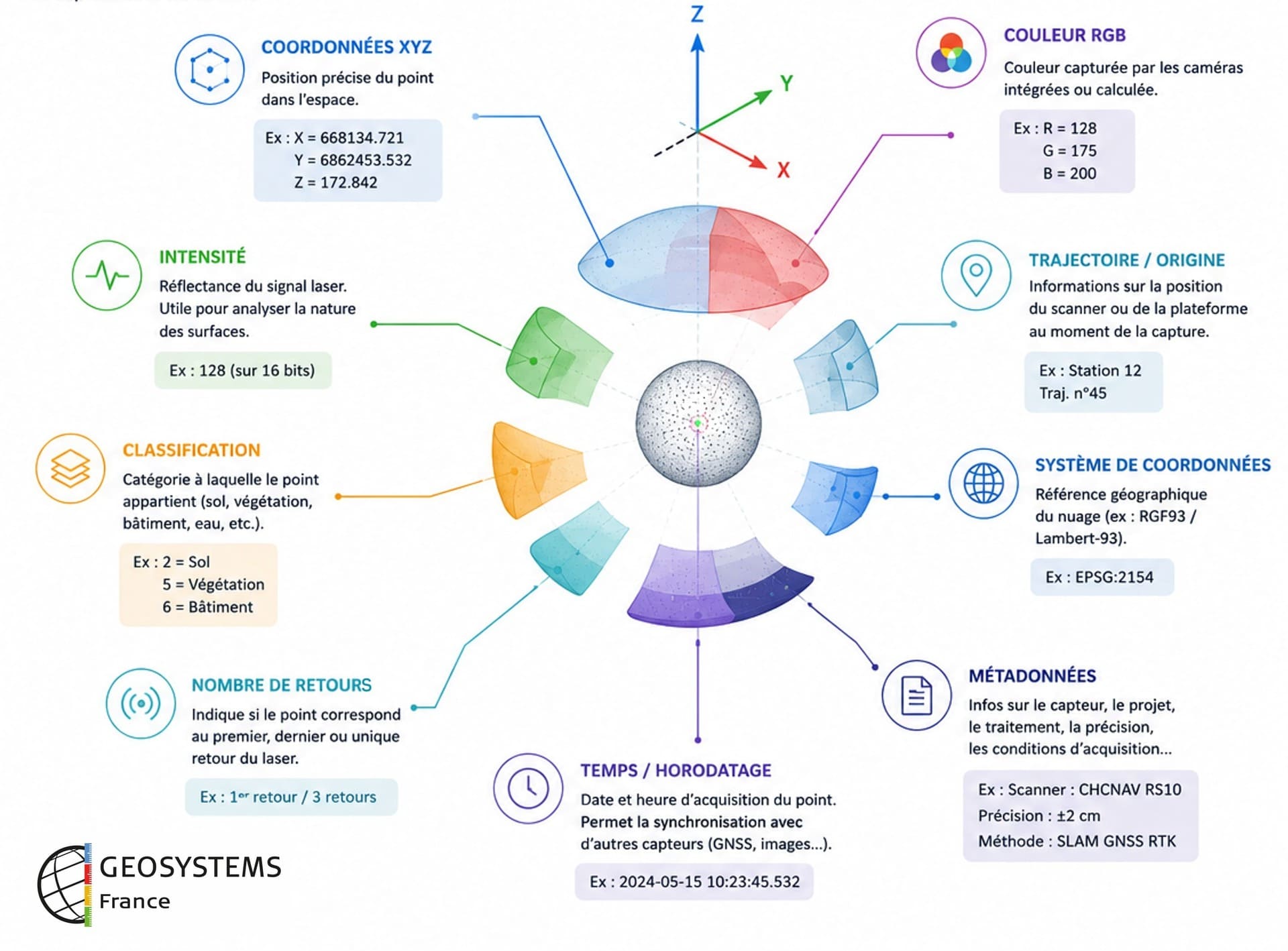
Un nuage de points n’est pas seulement une collection de coordonnées XYZ. Chaque point peut embarquer de nombreuses informations selon le format et le capteur…
Comment obtient-on un nuage de points ?
Plusieurs technologies permettent aujourd’hui de produire des nuages de points 3D. Le choix dépend du niveau de précision recherché, du contexte terrain, des volumes à capturer et du type de livrable attendu.
Les scanners statiques, sur trépieds
La lasergrammétrie statique reste très utilisée dans les environnements nécessitant une forte stabilité géométrique. Le scanner est positionné sur trépied et réalise des acquisitions fixes successives qui seront ensuite recalées entre elles. Cette approche offre généralement une excellente qualité géométrique et une très forte densité de points, mais les temps terrain peuvent devenir importants sur les grands projets.
Précision locale : 1-5 mm.
Précision globale (après recalage de plusieurs stations) : 5-15 mm sur un bâtiment complet (si les sphères ou cibles de recalage ont été bien posées).
Usage type : Auscultation de structure, façades historiques, détection de faux-plombs, pièces industrielles étroites.


Les scanners 3D mobiles
Les scanners mobiles SLAM utilisent une approche beaucoup plus dynamique. Ils combinent généralement LiDAR, IMU et parfois GNSS RTK afin de reconstruire simultanément la trajectoire du scanner et l’environnement capturé. Des scanners comme le CHCNAV RS10 ou le CHCNAV RS7 illustrent bien cette évolution vers des acquisitions plus rapides et plus mobiles. Cette technologie permet aujourd’hui de relever rapidement des bâtiments, voiries, usines, tunnels ou réseaux complexes. Mais les performances dépendent fortement des trajectoires réalisées, de l’environnement GNSS, de la méthodologie opérateur, de la qualité IMU et du post-traitement.
Précision locale : 1-2 cm, le nuage est plus « bruité », les lignes de points sont un peu plus épaisses). Elle dépend de la qualité du capteur et la méthodologie.
Précision globale : 2-5 cm pour un bâtiment de plusieurs étages.
Usage type : Rénovation intérieure classique, aménagement de bureaux, plans de niveaux pour des surfaces importantes (hôpitaux, écoles).
Le mobile mapping ou cartographie mobile
Le mobile mapping embarqué sur véhicule répond quant à lui aux projets d’infrastructures linéaires et de cartographie de grands corridors. Il permet de capturer rapidement routes, voies ferrées ou environnements urbains complets tout en produisant des volumes de données particulièrement importants.
Précision globale : 0,5-2 cm (extrêmement dépendante de la couverture GNSS/GPS et de la centrale inertielle IMU). En milieu urbain dense (« canyons urbains »), elle peut chuter si le signal GPS est masqué.
Usage type : Voirie, topographie de grands terrains, cubatures de carrières, couloirs ferroviaires.


La photogrammétrie
Enfin, la photogrammétrie reconstruit des environnements 3D à partir de photographies. Cette approche est très utilisée pour les façades, le patrimoine, les chantiers ou les acquisitions drone. Elle peut produire des nuages de points, des orthophotos, des meshes texturés ou des modèles 3D photoréalistes, mais reste fortement dépendante des conditions lumineuses, des textures visibles et de la qualité des prises de vue.
Précision globale : 2-5 cm (en X, Y) et 3-5 cm en altimétrie (Z).
La condition sine qua non : Pour atteindre ce niveau, il faut obligatoirement utiliser un drone ou un appareil équipé d’un système RTK (GPS topographique synchronisé avec une base au sol) OU positionner des cibles physiques au sol (GCP) relevées par un géomètre au tachéomètre. Sans cela, le modèle peut avoir une dérive ou une déformation de plusieurs dizaines de centimètres sur l’ensemble du projet.
Il n’existe pas une précision unique valable dans tous les contextes. Les performances réelles dépendent du GNSS, du comportement du SLAM, de la qualité IMU, des trajectoires terrain, du recalage, de l’environnement et du post-traitement.
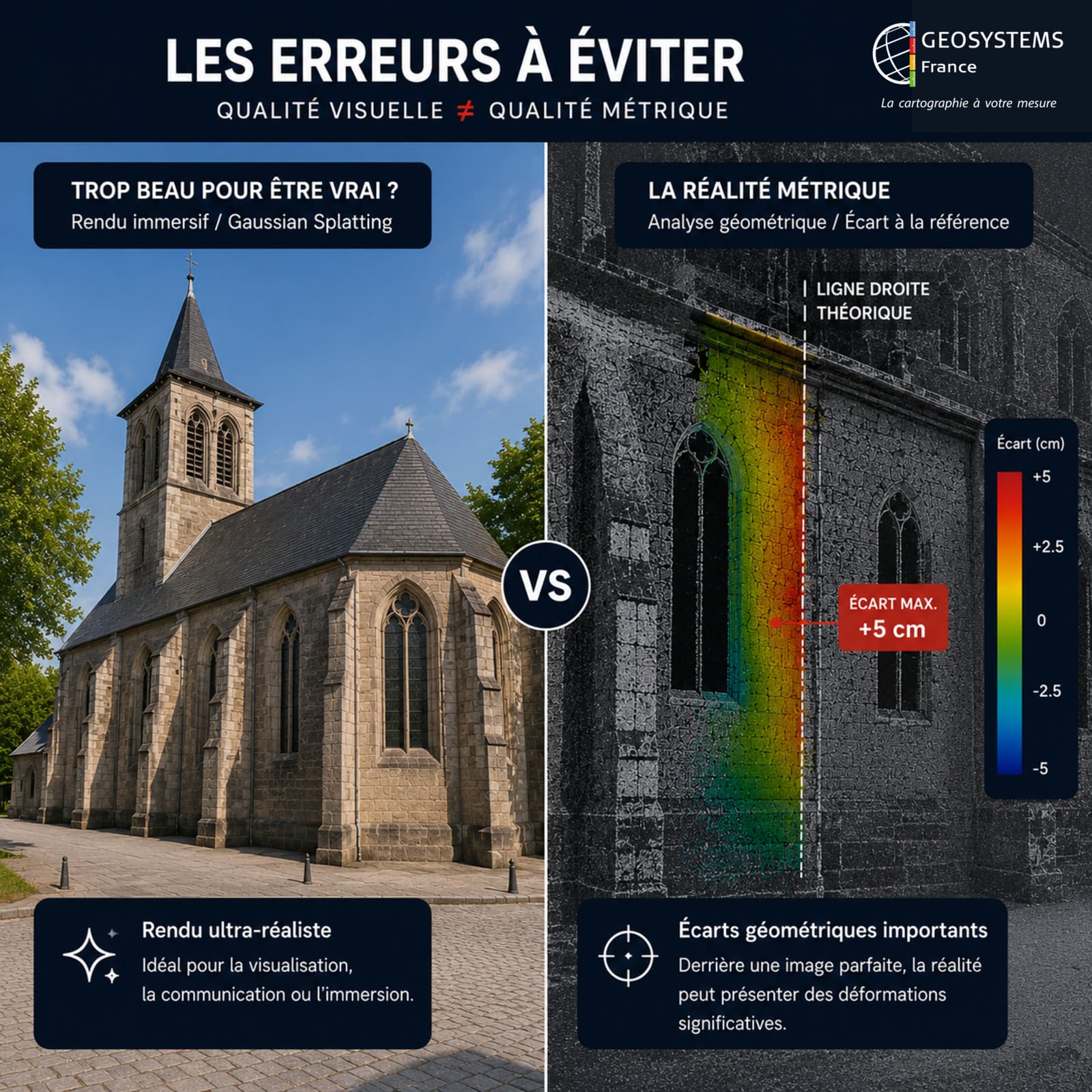
Un rendu extrêmement photoréaliste ne garantit donc pas automatiquement une excellente précision géométrique. Inversement, un nuage de points brut peut constituer une donnée très fiable pour la mesure ou le contrôle. Cette nuance reste essentielle dans les workflows professionnels.
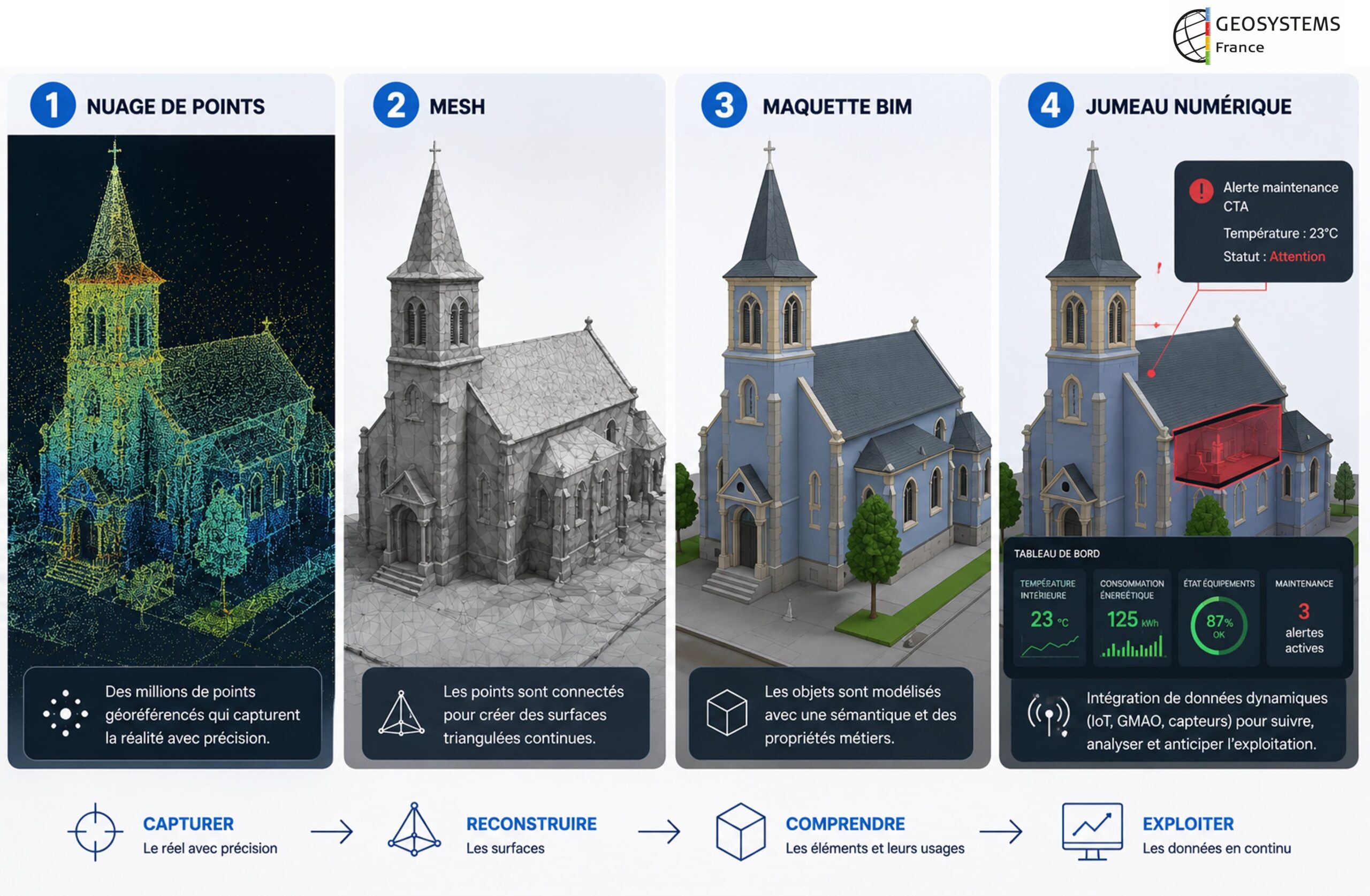
Nuage de points, mesh, BIM et jumeau numérique : quelles différences ?
Ces termes sont souvent mélangés alors qu’ils désignent des réalités très différentes de la modélisation 3D.
Le nuage de points reste avant tout un état des lieux du réel. Il stocke des points mesurables dans l’espace mais ne reconstruit pas directement les surfaces.
Le mesh fonctionne différemment. Il relie les points afin de créer des surfaces triangulées continues beaucoup plus lisibles visuellement. Cette approche est particulièrement adaptée à la visualisation, à la réalité virtuelle ou au patrimoine, mais elle introduit également une reconstruction géométrique qui peut simplifier certains détails.
La maquette BIM ajoute quant à elle une couche d’intelligence métier. Les objets deviennent exploitables : un mur est identifié comme un mur, une porte possède des propriétés techniques, une canalisation contient des informations réseau.
Le jumeau numérique pousse encore plus loin cette logique en intégrant parfois des données dynamiques liées à l’exploitation, la maintenance ou des capteurs IoT.
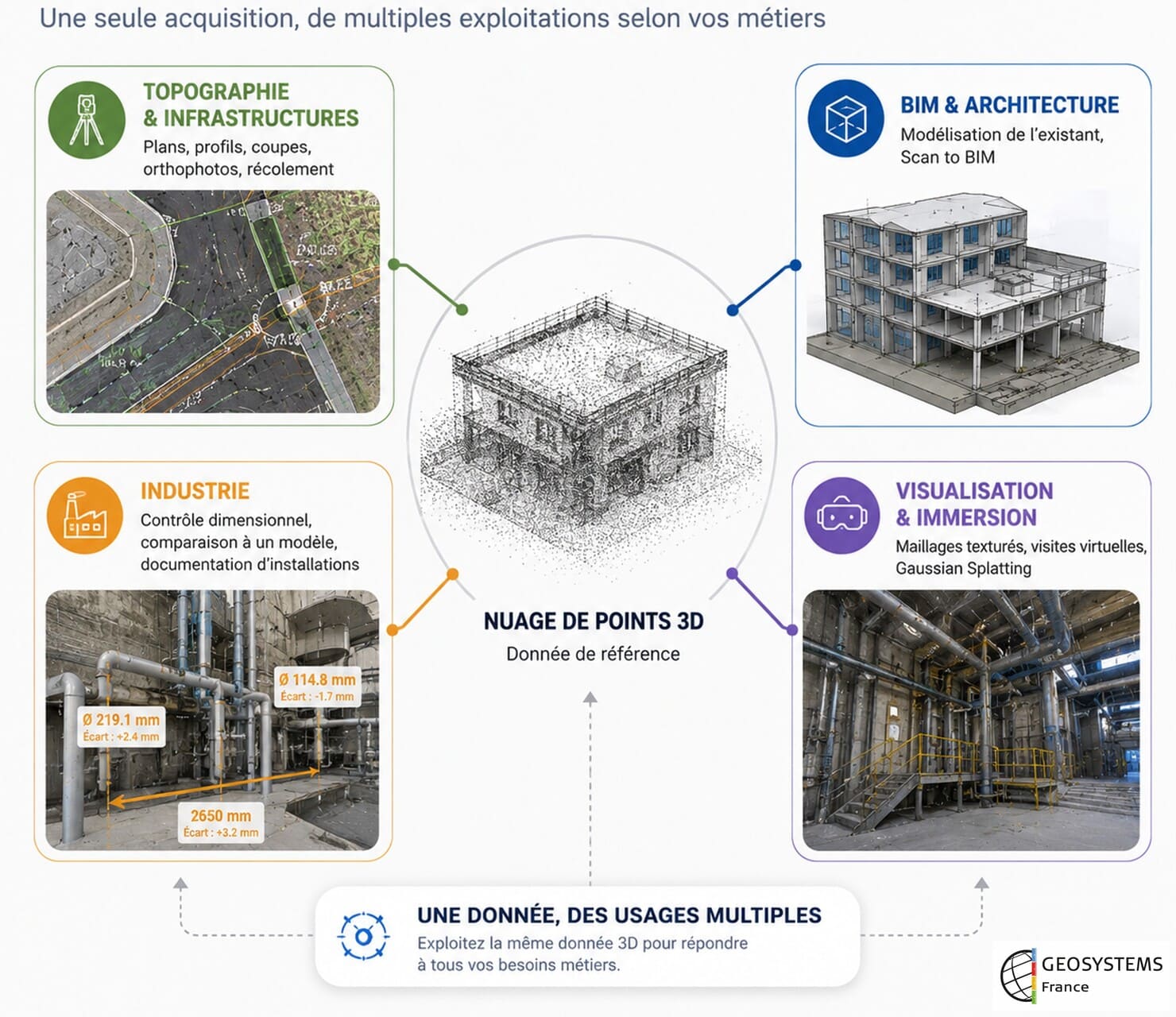
Ce qu’on peut vraiment faire avec un nuage de points
Le nuage de points n’est pas un livrable unique. Il constitue plutôt une base numérique capable d’alimenter des usages très différents selon les métiers.
Dans les workflows topographiques et infrastructures, les nuages de points servent fréquemment à produire des plans DAO (dessin assisté par ordinateur), des profils, des coupes, des orthophotographies ou des documents de récolement. Leur intérêt principal réside dans la conservation d’une très forte densité d’information permettant de revenir ultérieurement sur la donnée pour réaliser des mesures complémentaires.
Dans les projets BIM, les données capturées servent souvent de référence géométrique pour produire une maquette dans des logiciels comme Autodesk Revit ou Archicad. Cette approche devient particulièrement utile en rénovation, lorsque les plans historiques sont incomplets, imprécis ou obsolètes.
Les workflows industriels exploitent également les nuages de points pour réaliser des contrôles dimensionnels, comparer un existant à un modèle théorique ou documenter des installations complexes. Dans ces contextes, la capacité à capturer rapidement un environnement dense tout en conservant une forte fidélité géométrique représente un avantage considérable.
Les données peuvent également être utilisées dans des approches beaucoup plus visuelles. Les meshes texturés, les modèles immersifs ou les workflows de Gaussian Splatting permettent aujourd’hui de produire des représentations réalistes destinées à la communication, au patrimoine, à la visite virtuelle ou à la valorisation de projets.
Quel format choisir selon votre cas d’usage ?
Type de donnée | Fonction principale | Usage dominant | Niveau d’intelligence métier |
|---|---|---|---|
Nuage de points | mesurer le réel | topographie, contrôle, BIM | faible : le nuage de point est quasi-immédiatement disponible après traitement automatique |
Mesh 3D | reconstruire des surfaces | visualisation, patrimoine, VR | faible à moyen : le traitement est automatisé, mais il est recommandé de bien nettoyer le nuage de points afin d’éviter le bruit |
Maquette BIM | structurer des objets métier | conception, exploitation | élevé : à ce stade, un modeleur BIM a beaucoup classifié et enrichi la donnée |
Jumeau numérique | centraliser des données dynamiques | supervision et maintenance | très élevé : c’est un livrable final et dynamique sur l’ensemble d’un environnement |
Quels livrables demander selon votre besoin ?
L’une des erreurs les plus fréquentes consiste à demander “un scan 3D” sans définir précisément le besoin final.
Dans certains projets, un nuage brut géoréférencé sera parfaitement adapté. Dans d’autres, il sera beaucoup plus pertinent de demander directement des plans DAO, une maquette BIM, une orthophoto ou un livrable SIG prêt à exploiter. Le bon livrable dépend toujours du workflow métier final.
Besoin métier | Livrable généralement pertinent | Formats souvent utilisés |
|---|---|---|
Mesure topographique | nuage géoréférencé | LAS, LAZ, E57 |
Récolement et DOE | orthophoto + DAO | E57, orthophoto |
Scan to BIM | maquette BIM | E57, RCP/RCS |
Visualisation immersive | mesh texturé ou scène immersive | OBJ, PLY |
Archivage massif | stockage optimisé | LAZ |
SIG et infrastructures | données LiDAR techniques | LAS, LAZ |
Les formats des nuages de points
Les formats jouent un rôle central dans les workflows 3D car ils conditionnent le traitement, la diffusion, les performance et l’intéropérabilité logicielle.
- Les formats LAS et LAZ restent des références dans les environnements LiDAR et géospatiaux. Ils permettent de conserver coordonnées, intensités, classifications et autres attributs techniques essentiels aux traitements avancés.
- Le format E57 est aujourd’hui très utilisé dans les workflows BIM, architecture et levés 3D terrestre grâce à sa polyvalence et sa bonne interopérabilité.
- Les fichiers OBJ et PLY sont davantage orientés visualisation, reconstruction surfacique et environnements immersifs.
Le choix du format dépend donc moins d’une hiérarchie technique universelle que du contexte métier et du type de livrable attendu.
Comment exploiter ces données ?
Le scanner ne représente qu’une partie du workflow. Les logiciels jouent un rôle central dans le recalage, le nettoyage, la classification, la colorisation, le contrôle qualité et la production des livrables.
Des outils comme CloudCompare, Autodesk ReCap, Autocad, CoPre/CoProcess de CHCNAV, Trion Model, Leica Cyclone ou Trimble RealWorks répondent chacun à des besoins spécifiques.
Certains workflows privilégient la précision géométrique et les traitements avancés. D’autres privilégient la rapidité, l’intégration BIM, la visualisation immersive ou l’interopérabilité. Le “meilleur logiciel” n’existe donc pas de manière universelle. Tout dépend des usages, des volumes de données et des livrables attendus.
| Logiciel | Position dans la chaîne de traitement | Usage principal | Difficulté d’utilisation | Formats pris en charge | Public cible & métiers |
|---|---|---|---|---|---|
| CoPre | Tout début de chaîne : calcul trajectoire, recalage initial, géoréférencement | Traitement SLAM, recalage trajectoire, géoréférencement | ★☆☆☆ Débutant à intermédiaire |
Entrée : LAS, LAZ, E57, PLY Livrables : LAS, LAZ, DXF, TXT, CSV |
Géomètres Topographes TP / VRD |
| Trion Model | Début de chaîne : traitement rapide, visualisation, partage cloud | Visualisation immersive, orthophoto, récolement | ★☆☆☆ Débutant à intermédiaire |
Entrée : LAS, LAZ, E57, OBJ, PLY Livrables : LAS, LAZ, DXF, modèles web, splatting 3D |
Architectes Immobilier Patrimoine Collectivités |
| Leica Cyclone | Début de chaîne : recalage expert et consolidation de gros projets | Recalage scanner statique, traitement industriel | ★★★☆ Avancé à expert |
Entrée : E57, LAS, PTX, PTS Livrables : E57, LAS, exports CAO/BIM |
Géomètres-experts Industrie lourde |
| Trimble RealWorks | Début / milieu de chaîne : recalage, contrôle et préparation métier | Inspection, modélisation, exploitation topo | ★★★☆ Avancé |
Entrée : E57, LAS, LAZ, RCP/RCS Livrables : E57, LAS, exports CAO |
Géomètres Infrastructures Industrie |
| Terrasolid | Milieu de chaîne : classification et production géospatiale | Classification LiDAR, cartographie massive | ★★★★ Expert |
Entrée : LAS, LAZ, BIN Livrables : LAS, LAZ, MNT/MNS |
Cartographie aérienne SIG Environnement |
| CloudCompare | Milieu de chaîne : nettoyage, comparaison, contrôle qualité | Analyse géométrique avancée | ★★★☆ Intermédiaire à avancé |
Entrée : LAS, LAZ, E57, PLY, OBJ Livrables : quasi tous formats ouverts |
Ingénieurs Experts Chercheurs |
| Autodesk ReCap | Passerelle entre traitement scan et logiciels Autodesk | Indexation Scan to BIM | ★★☆☆ Débutant à intermédiaire |
Entrée : E57, LAS, LAZ, PLY Livrables : RCP, RCS |
Architectes BIM managers |
| AutoCAD | Fin de chaîne : production de plans et livrables 2D | DAO 2D/3D | ★★☆☆ Intermédiaire |
Entrée : RCP, RCS Livrables : DWG, DXF |
Dessinateurs Bureaux d’étude |
| Autodesk Navisworks | Fin de chaîne : coordination et revue projet | Coordination BIM, clash detection | ★★★☆ Intermédiaire |
Entrée : RCP, RCS, IFC Livrables : NWD, exports coordination |
BIM managers MOE |
| Bentley MicroStation | Fin de chaîne : exploitation infrastructure et SIG | Projets linéaires et infrastructures | ★★★☆ Avancé |
Entrée : LAS, LAZ, IFC, DGN Livrables : DGN, IFC |
Collectivités Ferroviaire |
| CoProcess | Fin de chaîne : valorisation visuelle et immersive | Maillage, 3DGS, visualisation | ★★☆☆ Intermédiaire |
Entrée : LAS, LAZ, E57, OBJ, PLY Livrables : OBJ, PLY, scènes immersives |
Bureaux d’étude Démonstration client |
| Blender | Toute fin de chaîne : rendu et communication visuelle | Rendu, animation, VR | ★★☆☆ Intermédiaire à avancé |
Entrée : OBJ, PLY, STL, FBX Livrables : rendus, animations |
Communication Patrimoine VR |
Les erreurs fréquentes dans les projets de scan 3D
Plusieurs erreurs reviennent régulièrement dans les projets liés aux nuages de points.
La première consiste à confondre qualité visuelle et qualité métrique. Certains modèles immersifs ou meshes texturés peuvent sembler spectaculaires tout en présentant des écarts géométriques importants invisibles à l’œil nu.
Une autre confusion fréquente consiste à croire qu’un nuage de points constitue automatiquement une maquette BIM exploitable. En réalité, le BIM nécessite un important travail de structuration métier supplémentaire. Les volumes de données sont également très souvent sous-estimés. Les scanners modernes peuvent générer plusieurs dizaines de gigaoctets par acquisition, ce qui impacte directement le stockage, les temps de traitement et les échanges cloud. Le géoréférencement reste également un point critique. Une donnée non correctement positionnée dans un référentiel réel devient rapidement difficile à exploiter dans des workflows professionnels.
Enfin, certaines technologies immersives comme le Gaussian Splatting sont parfois présentées comme capables de remplacer complètement les données métriques traditionnelles. En pratique, ces approches restent aujourd’hui principalement orientées vers l’immersion plutôt que vers les traitements topographiques.
FAQ
Un nuage de points est une représentation numérique du réel composée de millions de points mesurés dans l’espace à partir d’un scanner LiDAR, d’un scanner SLAM ou d’une photogrammétrie.
Les données sont produites par des technologies de capture comme le LiDAR, la lasergrammétrie, le mobile mapping ou la photogrammétrie, puis recalées et traitées dans des logiciels spécialisés.
Le nuage de points représente le réel mesuré alors que la maquette BIM structure des objets métier intelligents exploitables dans des workflows bâtiment et exploitation.
Oui. Les nuages de points permettent de générer des plans, coupes, profils, orthophotos et élévations très utiles dans les workflows DAO et infrastructures.
Les principaux formats utilisés aujourd’hui sont LAS, LAZ, E57, RCP/RCS, OBJ et PLY.
CloudCompare, Autodesk ReCap, Leica Cyclone, Trimble RealWorks ou encore certains outils BIM et SIG spécialisés sont parmi les logiciels les plus utilisés.
Le nuage brut reste pertinent pour la mesure ou l’archivage technique. En revanche, dans des workflows bâtiment ou exploitation, une maquette BIM ou un livrable métier sera souvent plus adapté.
Pour finir
Il n’existe pas un “meilleur format 3D” universel. Il existe surtout un bon format pour un usage, un métier, un logiciel et un niveau d’exploitation donné.
Le levé 3D moderne ne se limite plus à la capture terrain. Il s’inscrit désormais dans une chaîne complète mêlant acquisition, géoréférencement, traitement, contrôle qualité, structuration des données, intégration BIM ou SIG, visualisation immersive et exploitation métier. Comprendre les différences entre un nuage de points, un mesh, une maquette BIM ou une scène immersive devient aujourd’hui essentiel pour éviter les confusions et produire des livrables réellement utiles aux utilisateurs finaux. En pratique, la valeur d’une acquisition ne dépend pas uniquement du scanner utilisé. Elle dépend surtout de la capacité à transformer une réalité capturée en une donnée fiable, exploitable et adaptée aux contraintes opérationnelles du projet.
La donnée 3D n’a réellement de valeur que lorsqu’elle devient compréhensible, exploitable et utile à la décision.