CHCNAV RS10, scanner dynamique SLAM visuel & GNSS RTK

Le scanner 3D mobile GNSS + SLAM pour les relevés rapides et précis
Le CHCNAV RS10 est un scanner 3D mobile conçu pour simplifier la capture de données spatiales dans des environnements complexes. En combinant GNSS RTK, LiDAR et technologie SLAM (simultaneous localization mapping), cet équipement permet de réaliser des relevés 3D précis tout en se déplaçant, sans nécessiter de stations fixes ni de configurations longues sur le terrain.
Pour les professionnels de la topographie, du BIM, des infrastructures ou de la cartographie, le RS10 représente une évolution majeure dans la manière de collecter des données géospatiales. L’utilisateur peut scanner des espaces entiers en marchant, tout en obtenant un nuage de points dense et géoréférencé en temps réel.
La combinaison unique du SLAM et du GNSS
Un appareil multicapteurs
Le CHCNAV RS10 repose sur l’intégration de plusieurs technologies complémentaires qui permettent de capturer des données 3D fiables dans pratiquement toutes les situations. La base du système est un scanner LiDAR capable d’émettre des centaines de milliers de points par seconde. Ce capteur mesure la distance entre l’appareil et les surfaces environnantes, créant progressivement un nuage de points représentant l’environnement.
Pour déterminer la position du scanner, le RS10 utilise deux méthodes simultanément. La première est la technologie SLAM , qui calcule en continu la position du capteur à partir des éléments visibles dans l’environnement. Cette méthode est particulièrement efficace dans les environnements fermés ou complexes où le signal satellite est faible.
La seconde est un récepteur GNSS multi-constellations : en mode RTK, le scanner peut obtenir une précision centimétrique en extérieur lorsqu’il est connecté à un réseau de correction.
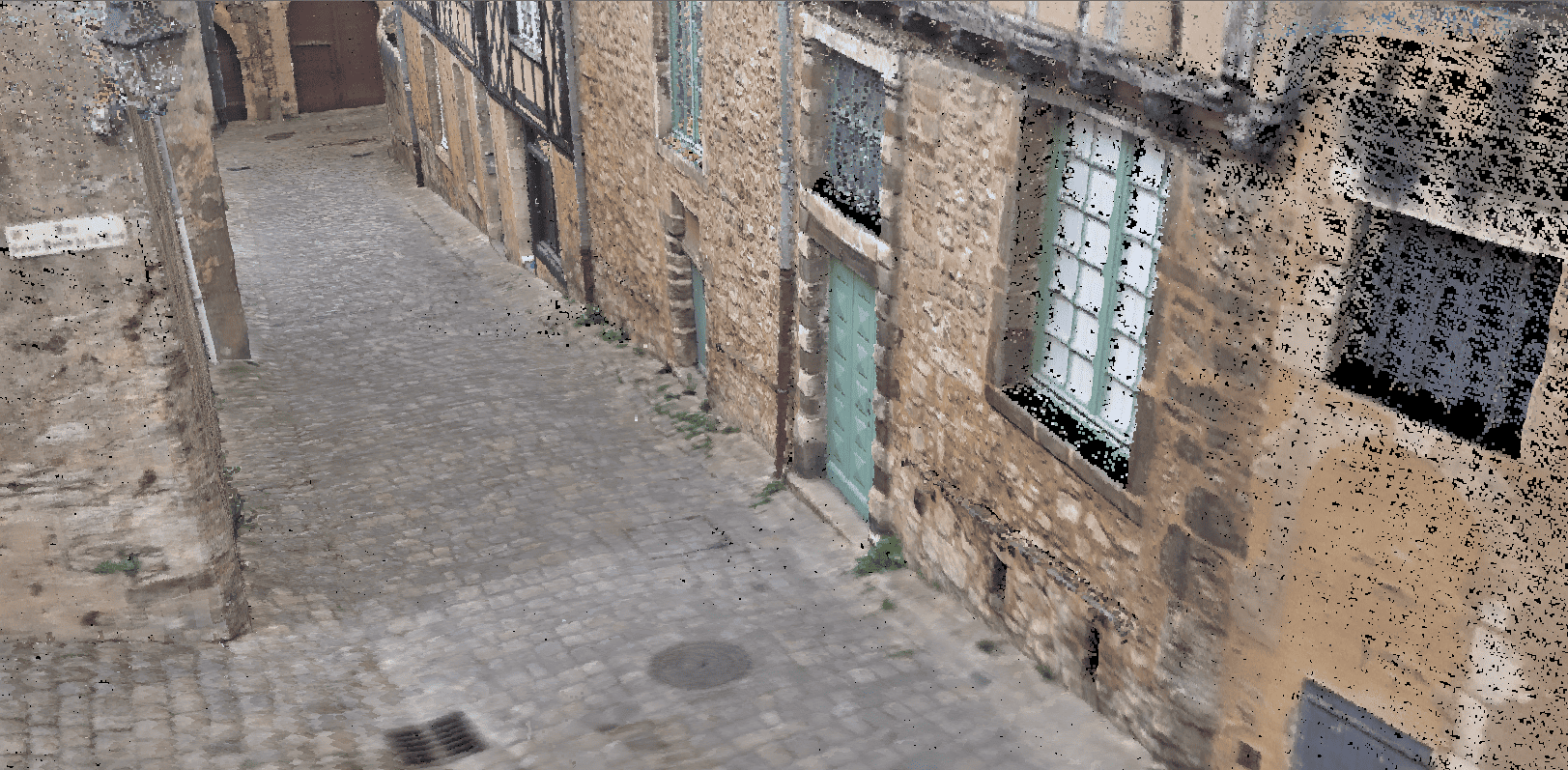
Enfin, le RS10 intègre 2 caméra HD pour coloriser les nuages de points.
Cette combinaison GNSS + SLAM LiDAR permet au RS10 de fonctionner aussi bien dans des zones urbaines ouvertes que dans des espaces confinés, comme les bâtiments, les tunnels ou les sites industriels.


Cas d’usage professionnels du RS10
Le CHCNAV RS10 est utilisé dans de nombreux secteurs où la collecte rapide de données 3D est essentielle.
Dans la topographie, il permet de réaliser des levés rapides sur de grandes surfaces, par exemple pour préparer un projet d’aménagement ou documenter un site.
Dans les infrastructures, il est particulièrement utile pour la numérisation de routes, de voies ferrées ou d’ouvrages d’art.
Les professionnels du BIM et de l’architecture utilisent le RS10 pour produire des nuages de points destinés à la modélisation de bâtiments existants.
Les collectivités et bureaux d’études l’emploient également pour la cartographie urbaine, l’inventaire du mobilier urbain ou la documentation d’espaces publics.
Dans ces différents contextes, la capacité du scanner à capturer rapidement des zones entières en marchant permet de réduire considérablement les temps de terrain.
Ce qui distingue le RS10 des autres scanners SLAM
Le marché des scanners 3D mobiles a fortement évolué ces dernières années, avec de nombreuses solutions basées sur la technologie SLAM.
Le RS10 se distingue principalement par l’intégration native du GNSS RTK, ce qui permet d’obtenir un nuage de points directement géoréférencé sans devoir effectuer un recalage complexe.
Cette capacité est particulièrement appréciée dans les métiers de la topographie, où la précision absolue est essentielle.
La combinaison des constellations GPS, Glonass, Galileo et BeiDou améliore également la robustesse du positionnement dans les zones urbaines ou semi-ouvertes.

Le CHCNAV RS10 offre des performances exceptionnelles pour la capture 3D, avec à la combinaison SLAM + RTK unique sur le marché. Alliant précision, mobilité et rapidité, il garantit un rapport qualité/prix inégalé pour vos projets de numérisation.
Contenu du kit CHCNAV RS10

Levé de corps de rue avec plastron de portage inclus
| Informations techniques | |
|---|---|
| Malette de transport | |
| Batteries x3, chargeur 4 emplacements et câble Batterie additionnelle en option | |
| Embase | |
| Logiciel CoPre (Windows) (1 licence permanente) | |
| Application mobile SmartGo | |
| Plastron de portage | |
| Canne topographique (en option selon le pack) | |
| Caméra Insta 360 + support dédié (en option selon le pack) | |
| Logiciel Coprocess (en option) | |
Caractéristiques techniques
Il existe deux scanners dans la gamme :
• Le RS10 combine GNSS, LiDAR et SLAM visuel, il est idéal pour réaliser des scans précis pour de nombreux secteurs d’activité. C’est le modèle le plus accessible de la gamme.
• Le RS10 32-lignes, le modèle le plus performant, est équipé d’un LiDAR haute densité (32 lignes), offrant une résolution et une couverture supérieures au modèle 16-lignes. Il est également un peu plus léger. Ce modèle est parfaitement adapté aux relevés complexes, où une densité de points accrue et une précision renforcée sont indispensables.
Qu’est ce qui différencie le RS10 16-lignes et le 32-lignes ?
| Informations techniques | |
|---|---|
| Vitesse de capture | 320 000 pts/s (version 16 lignes) 640 000 pts/s (version 32 lignes) |
| Portée | 0,05 à 120 m (version 16 lignes) 0,5m à 300 m (version 32 lignes) Champ de vision : 360° x 270° |
| Précision | Relative : <1 cm Absolue : 5 cm (version 16 lignes) 2 cm (version 32 lignes) |
| Caméras intégrées | 3x5 MP, champs de vision 210°x170° |
| GNSS | 8 mm H / 15 mm V + 1 ppm Multiconstellations (GPS, GLONASS, BeiDou, GALILEO...) |
| Indice de protection | IP64 |
| Autonomie | 1 h par batterie, échangeable à chaud |
| Poids | 1,9 kg (version 16 lignes) 1,7 kg (version 32 lignes) |

Les scanners RS10 32-ligne et 16-lignes
Traitement des données avec le logiciel CoPre
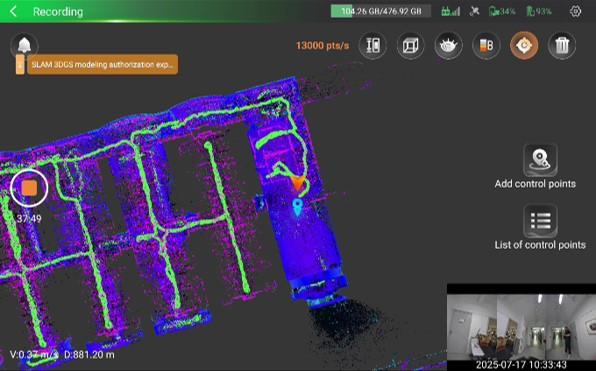
L’application terrain SmartGo permet également de suivre la capture en temps réel et de contrôler la qualité des données directement sur le terrain.
Après la phase d’acquisition terrain, les données sont traitées dans CoPre pour optimiser le recalage et la précision des nuages de points.
Ce logiciel permet de fusionner les données issues du LiDAR, du GNSS et des capteurs inertiels. L’algorithme reconstruit la trajectoire du scanner et corrige les éventuelles dérives SLAM.
Une fois le traitement terminé, les données peuvent être exportées sous différents formats standards utilisés dans les métiers de la géomatique, du BIM ou de la topographie.
Le workflow est conçu pour être relativement simple, même pour des utilisateurs qui découvrent la numérisation 3D mobile. Une formation est généralement proposée afin de maîtriser les étapes de traitement et d’optimisation.
Demandez dès maintenant votre devis personnalisé pour le CHCNAV RS10 !
Notre FAQ à propos du scanner LiDAR RS10
Le SLAM permet de créer des nuages de points géoréférencés en temps réel, sans post-traitement lourd. Associée au GNSS RTK, elle assure des relevés précis dans tous les environnements.
Non, si le GNSS en RTK est actif. Grâce à la combinaison GNSS + SLAM, il élimine la contrainte de fermeture de boucle, ce qui simplifie l’organisation des levés et réduit le temps passé sur le terrain.
Chaque batterie offre environ 1 heure d’autonomie et peut être échangée à chaud (hot swap), permettant une utilisation continue sans interruption.
Il propose une technologie unique SLAM + GNSS RTK, une précision centimétrique, et un prix bien inférieur à celui des marques traditionnelles. Il combine polyvalence, rapidité et simplicité, avec un rapport qualité/prix inégalé.













