SLAM LiDAR : comprendre, comparer et choisir la cartographie 3d intelligente
Le capteur SLAM LiDAR des scanners portables s’est imposé en quelques années comme une technologie clé pour la capture 3D mobile. Leurs algorithmes avancés leur permettent de cartographier un environnement inconnu tout en se localisant dans l’espace en temps réel, de manière autonome, sans dépendre d’un signal GNSS permanent. Pour les géomètres, les responsables BIM, les bureaux d’études et les directions innovation, ces appareils deviennent des investissements indispensables.
Voici notre guide pour comprendre le fonctionnement du SLAM LiDAR, ses performances réelles, ses limites, ses cas d’usage professionnels et les critères de décision à considérer avant de déployer un scanner mobile basé sur cette technologie.
Qu’est-ce que le SLAM LiDAR ?
Le SLAM LiDAR associe deux briques technologiques majeures.
D’un côté, le LiDAR – light detection ranging – repose sur l’émission d’impulsions laser et la mesure du temps de retour pour calculer des distances. Chaque impulsion génère un point dans l’espace, et l’ensemble constitue un nuage de points tridimensionnel représentant la géométrie d’un objet ou d’un environnement.
De l’autre côté, le SLAM – simultaneous localization and mapping – désigne une famille d’algorithmes capables de résoudre simultanément deux problèmes : estimer la position du capteur dans l’espace et construire une carte de l’environnement. Le système analyse en continu les données issues des capteurs (LiDAR, centrale inertielle, parfois caméras, voire GNSS RTK) pour mettre à jour une carte cohérente et corriger la dérive de trajectoire.
Le SLAM LiDAR combine ces deux approches : il utilise le capteur LiDAR pour collecter des données 3D et l’algorithme SLAM pour localiser le scanner et cartographier en temps réel. Cette technologie est particulièrement adaptée aux espaces où le GPS est absent ou dégradé, comme les bâtiments (intérieurs et extérieurs), les tunnels ou les zones industrielles. Les scanners les plus performants sont suffisamment précis pour capturer des objets de petite taille.

Comment fonctionne un système SLAM LiDAR ?
Acquisition des données
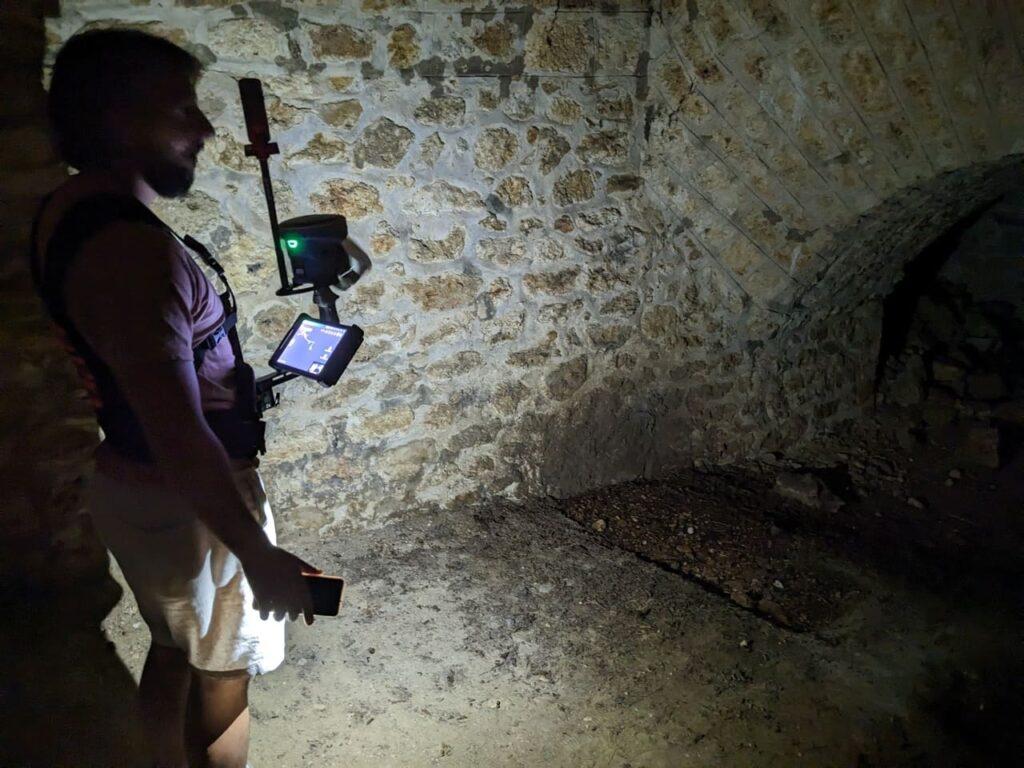
Un scanner embarque généralement un capteur LiDAR rotatif et/ou multi-faisceaux, une unité de mesure inertielle et un module de calcul. Ce dernier envoie des impulsions laser dans toutes les directions et enregistre les distances. Chaque rotation génère des milliers, voire des millions de points par seconde.
Ces données brutes décrivent la géométrie de l’environnement. Cependant, elles ne sont exploitables que si la position du capteur à chaque instant est connue avec précision.


Estimation de la trajectoire
L’algorithme SLAM analyse les variations successives du nuage de points pour estimer le déplacement du scanner. On parle d’odométrie LiDAR. À chaque pas de temps, le système compare les scans successifs et calcule la transformation spatiale qui aligne les deux ensembles de points.
L’un des défis majeurs est la dérive. À mesure que le scanner se déplace, les erreurs d’estimation s’accumulent. Pour corriger ce phénomène, les systèmes SLAM intègrent des mécanismes de détection de boucles, appelés loop closure. Lorsqu’un environnement déjà scanné est reconnu, l’algorithme ajuste globalement la trajectoire pour réaligner les données.
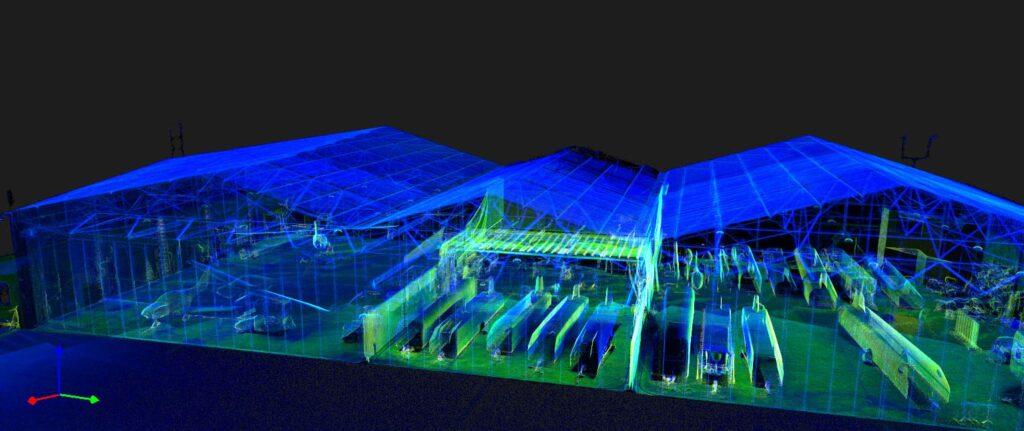
Génération du nuage de points
Une fois la trajectoire estimée et corrigée, les données LiDAR sont fusionnées dans un référentiel commun pour produire un nuage de points cohérent. Ce nuage peut ensuite être traité pour générer des plans, des modèles 3D ou des livrables BIM.
Dans un contexte professionnel, le traitement inclut souvent un recalage sur un système de coordonnées externe, via des cibles ou un géoréférencement par GNSS en mode RTK lorsque cela est possible.
SLAM LiDAR, visual SLAM et autres technologies : quelles différences ?
Il est essentiel de distinguer le SLAM LiDAR du visual SLAM. Celui-ci s’appuie principalement sur des caméras haute résolution et des images pour reconstruire un scène. Il est sensible aux conditions d’éclairage et aux textures visuelles.
Le SLAM LiDAR, lui, exploite des impulsions laser. Il est moins dépendant de la lumière ambiante et plus robuste dans des endroits pauvres en texture visuelle, comme des couloirs industriels ou des parkings souterrains. Un scan issu d’un relevé photogrammétrique est souvent un peu moins précis et plus difficilement exploitable pour réaliser des mesures. Notons que de plus en plus de modèles intègrent des caméras pour combiner les informations LiDAR et colorisation.
Par rapport à un scanner statique traditionnel, le SLAM LiDAR offre une mobilité incomparable. Le scanner statique produit souvent une précision millimétrique sur des stations fixes, mais nécessite un repositionnement manuel et un recalage complexe entre les scans. Le SLAM LiDAR privilégie donc la continuité et la rapidité, au prix d’une précision relative dépendant fortement du contexte et de la qualité de l’algorithme.
Cas d’usage professionnels du SLAM LiDAR
Cartographie indoor et scan to BIM
Dans les bâtiments existants, le SLAM LiDAR permet de numériser rapidement des plateaux entiers, des cages d’escalier ou des réseaux techniques. Les données sont ensuite exploitées pour produire des modèles BIM, réaliser des diagnostics structurels ou préparer des travaux de rénovation.

Infrastructures et environnements contraints
Les tunnels, les galeries techniques, les parkings souterrains et les sites industriels constituent des environnements où le GNSS est inexploitable. Le SLAM LiDAR offre ici une solution de localisation et de cartographie simultanées particulièrement pertinente.
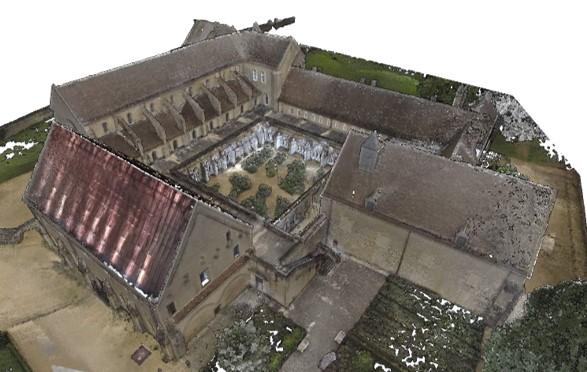
Patrimoine, mines et zones difficiles d’accès
Dans les mines ou sur des sites patrimoniaux, la capacité à cartographier un environnement inconnu tout en se localisant en temps réel représente un gain opérationnel majeur. La technologie SLAM permet de cartographier des zones complexes avec une logistique allégée.

Performances et précision : que peut-on réellement attendre ?
La précision dépend de plusieurs facteurs : qualité du capteur, fréquence des impulsions laser, configuration de l’environnement et robustesse de l’algorithme SLAM.
Dans des conditions favorables, certains systèmes mobiles affichent des précisions relatives centimétriques (entre 0,6 cm et 2 cm selon les modèle) sur des trajectoires optimisées. Toutefois, il est crucial de comprendre que la dérive augmente avec la distance parcourue et la répétitivité des environnements. Les couloirs longs et homogènes peuvent dégrader les performances si aucune boucle n’est détectée.
La précision absolue nécessite généralement un recalage sur des points de contrôle ou un ancrage GNSS lorsque l’environnement le permet. Les fabricants comme CHCNAV ou FJDynamics intègrent des architectures hybrides combinant SLAM, IMU de haute qualité et, dans certains cas, positionnement GNSS pour renforcer la cohérence globale des livrables.
Comparatif décisionnel : quand choisir le SLAM LiDAR ?
| Critère | SLAM LiDAR | Scanner statique | Photogrammétrie ou visual SLAm |
|---|---|---|---|
| Mobilité | Très élevée | Faible | Très élevée |
| Vitesse d'acquisition | Rapide | Lente | Rapide |
| Dépendance à la lumière | Faible | Nulle | Forte |
| Dépendance au GNSS | Faible | Possible | Faible |
| Complexité de mise en œuvre | Faible | Elevée | Faible |
| Précision relative | Elevée (0,6-2 cm) | Très élevée (mm) | Moyenne, peu exploitable pour de la mesure professionnelle |
Ce tableau indique que le SLAM LiDAR est particulièrement pertinent lorsque la rapidité, la continuité de capture et l’autonomie terrain priment sur la précision millimétrique.
Intégration dans un workflow professionnel
Dans un bureau d’études ou chez un géomètre, le déploiement du SLAM LiDAR ne s’arrête pas à la capture.
Les données doivent être transférées, traitées, nettoyées et éventuellement recalées. Les nuages de points sont ensuite intégrés dans des logiciels de modélisation ou de cartographie pour produire des plans, des coupes ou des maquettes numériques.
L’enjeu est de maîtriser la chaîne complète : acquisition, contrôle qualité, traitement, livraison. Une compréhension fine de la technologie SLAM et des capteurs LiDAR est indispensable pour garantir la fiabilité des livrables.
Limites et précautions à connaître
Bien que très polyvalent, le SLAM LiDAR n’est pas une solution universelle.
Les environnements répétitifs, les espaces très ouverts sans structures verticales, ou les vibrations excessives peuvent affecter la qualité des données. La gestion de la dérive et la validation terrain sont des étapes clés.
De plus, la précision annoncée par les fabricants doit être analysée à la lumière du protocole de test et des conditions d’usage. Un benchmark interne sur vos propres sites reste la meilleure approche pour évaluer la performance réelle.
Pour résumer
C’est une technologie combinant un capteur LiDAR et un algorithme pour se localiser et cartographier simultanément un environnement.
Le SLAM LiDAR utilise des impulsions laser pour mesurer les distances, tandis que le visual SLAM exploite des images issues de caméras. Le LiDAR est généralement plus robuste dans des environnements peu texturés ou mal éclairés. Cela dit, de nombreux modèles proposent la combinaison des deux technologies pour des rendus à la fois beaux et exploitables.
Oui. C’est l’un de ses principaux avantages. Il peut cartographier un intérieur ou un souterrain sans signal GNSS. Là encore, il est possible de combiner les deux pour des livrables toujours plus fiables.
La précision dépend du modèle, de la qualité de l’IMU et de l’environnement. Elle est souvent centimétrique en relatif, sous réserve d’un protocole de capture maîtrisé et d’une bonne technique de la part de l’opérateur.
Oui, notamment pour le scan to bim. Il permet de générer rapidement un nuage de points exploitable pour la modélisation 3D.

Conclusion : vers une cartographie mobile maîtrisée
Le SLAM LiDAR représente une évolution majeure des technologies d’acquisition 3D. Il ouvre la voie à une capture 3D plus agile, capable de cartographier et de se localiser en temps réel dans des espaces et objets complexes.
Pour un acteur professionnel, le véritable enjeu n’est pas seulement technologique. Il réside dans la capacité à intégrer ces appareils dans un workflow robuste, à comprendre ses limites et à choisir la solution adaptée aux besoins métier.
Chez GEOSYSTEMS France, nous accompagnons les professionnels de la topographie et de la capture 3D dans leurs choix technologiques. Si vous souhaitez évaluer la pertinence du SLAM LiDAR pour vos projets, échangeons sur vos contraintes terrain et vos objectifs de production.














